| |
Leadshine步进系统: |
|
|
| |
|
|
|
|
两相步进驱动器: |
|
|
| |
 |
|
|
|
步进驱动器选型指南: |
| |
|
|
|
|
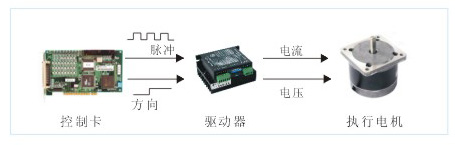
步进驱动器是步进系统中的核心组件之一。如下图所示,它按照控制器发来的脉冲/方向指令(弱电信号)对电机线圈电流(强电)进行控制,从而控制电机转轴的位置和速度。Leadshine公司驱动器全部采用先进的双极恒流斩波方式对步进电机进行驱动。 |
|
 |
|
|
|
步进驱动器工作模式
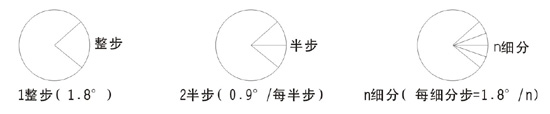
有三种基本的步进电机驱动模式:整步、半步、细分。其主要区别在于电机线圈电流的控制精度(即激磁方式)。
- 整步驱动
在整步运行中,同一种步进电机既可配整/半步驱动器也可配细分驱动器,但运行效果不同。步进驱动器按脉冲/方向指令对两相步进电机的两个线圈循环激磁(即将线圈充电设定电流),这种驱动方式的每个脉冲将使电机移动一个基本步距角,即1.80
度(标准两相电机的一圈共有200个步距角)。
- 半步驱动
在单相激磁时,电机转轴停至整步位置上,驱动器收到下一脉冲后,如给另一相激磁且保持原来相继处在激磁状态,则电机转轴将移动半个步距角,停在相邻两个整步位置的中间。如此循环地对两相线圈进行单相然后双相激磁步进电机将以每个脉冲0.90度的半步方式转动。所有Leadshine公司的整/半步驱动器都可以执行整步和半步驱动,由驱动器拨码开关的拨位进行选择。和整步方式相比,半步方式具有精度高一倍和低速运行时振动较小的优点,所以实际使用整/半步驱动器时一般选用半步模式。
- 细分驱动
细分驱动模式具有低速振动极小和定位精度高两大优点。对于有时需要低速运行(即电机转轴有时工作在60rpm以下)或定位精度要求小于0.90度的步进应用中,细分驱动器获得广泛应用。其基本原理是对电机的两个线圈分别按正弦和余弦形的台阶进行精密电流控制,从而使得一个步距角的距离分成若干个细分步完成。如上图所示。例如十六细分的驱动方式可使每圈200标准步的步进电机达到每圈200*16=3200步的运行精度(即0.1125°)。Leadshine公司可提供规格齐全、性能优越、品质可靠、价格优惠的十余款细分驱动器。
|
|
 |
选型列表
|
|
型号
|
电流
|
电压
|
细分数
|
适配电机
|
重量
|
外型尺寸(mm)
|
控制信号
|
|
细
分
系
列
|
M415B
|
0.21-1.5A
|
DC(18-40V)
|
1-64
|
39,42
|
115g
|
86×55×20
|
单端
|
|
M420
|
0.25-2.0A
|
DC(18-40V)
|
2-128,5-125
|
42,57
|
299g
|
95×76×45
|
单端
|
|
MA335B
|
1.3-3.5A
|
DC(12-42V)
AC(10-29V)
|
2-128,5-125 |
42,57
|
386g
|
132×76×45
|
单端
|
|
M325 |
0.39-2.5A |
DC(12-32V) |
1-8 |
42,57 |
115g |
86×55×20 |
单端 |
|
M535
|
1.3-3.5A
|
DC(18-46V)
|
2-256,5-250
|
57,86
|
335g
|
132×76×45
|
差分
|
|
M542 |
1.0-4.2A |
DC(20-50V) |
2-128,5-125 |
42,57,86 |
280g |
118×75.5×33 |
差分
|
|
MD556 |
1.4-5.6A |
DC(20-50V) |
2-128,5-125 |
42,57 |
280g |
118×75.5×33 |
差分 |
|
M860 |
2.0-6.0A |
DC(24-90V) |
2-256,5-250 |
57,86 |
683g
|
151×100×56 |
差分 |
|
MA860
|
2.0-6.0A
|
AC(18-60V)
|
2-128,5-200 |
57,86
|
680g
|
151×97×48
|
差分
|
|
M880
|
1.4-7.8A
|
DC(24-90V)
|
2-256,5-250
|
86,110
|
440g
|
119×97×48
|
差分
|
|
M840
|
1.4-4.0A
|
DC(24-90V)
|
2-256,5-250 |
86,110 |
342g
|
119×97×31 |
差分
|
|
MD2278 |
0.45-7.8A |
AC(90-200V) |
2-50 |
86,110,130 |
1050g |
212×158.7×13.5 |
差分 |
|
ND2282
|
0.45-7.8A
|
AC(90-220V)
|
2-50
|
86,110,130
|
1000g
|
212×167×64
|
差分
|
|
|
|
|
命名规则 |
|
 |
|
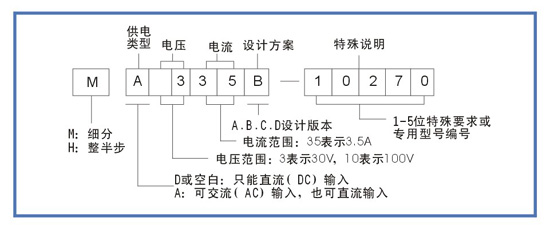
上例表示细分型,交流供电最高30VAC,电流最大3.5A,设计版本为B,专用编号为10270的步进驱动器。 |
|
|
|
选型原则 |
- 驱动器的电流:
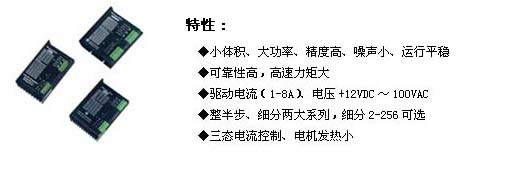
电流是判断驱动器能力的大小,是选择驱动器的重要指标之一,通常驱动器的最大电流要略大于电机标称电流,通常驱动器有2.0A、3.5A、6.0A、8.0A等规格。
- 驱动器供电电压:
供电电压是判断驱动器升速能力的标志,常规电压供给有:24VDC、40VDC、80VDC、110VAC等。
- 驱动器的细分:
细分是控制精度的标志,通过增大细分能改善精度。细分能增加电机平稳性,通常步进电机都有低频振动的特点,通过加大细分可以改善,使电机运行非常平稳。
|
|
控制信号接口说明
|
- 差分式接口:
多数Leadshine驱动器采用差分式接口电路,内置高速光电耦合器
,允许接收长线驱动器,集电极开路和PNP输出电路的信号,可适配各种控制器接口,包括西门子PLC。建议用长线驱动器(例如:AM26LS31)电路,抗干扰能力强。
- 单/双脉冲模式:
多数Leadshine驱动器可以接收两类脉冲信号:一种为脉冲+方向形式(单脉冲);一种为正脉冲+反脉冲(双脉冲)形式。可通过驱动器内部的跳线器进行选择。
|
|
 |
|
|
|
|
|
|
| |
两相混合式步进: |
|
| |
 |
|
|
|
步进电机选型指南: |
|
|
|
何为步进电机 |
|
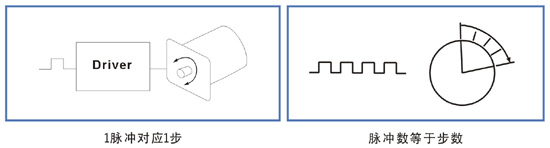
步进电机是一种专门用于位置和速度精确控制的特种电机。步进电机的最大特点是其“数字性”,对于微电脑发过来的每一个脉冲信号,步进电机在其驱动器的推动下运转一个固定角度(简称一步),如下图所示。如接收到一串脉冲步进电机将连续运转一段相应距离。同时您可通过控制脉冲频率,直接对电机转速进行控制。由于步进电机工作原理易学易用,成本低(相对于伺服)、电机和驱动器不易损坏,非常适合于微电脑和单片机控制,因此近年来在各行各业的控制设备中获得了越来越广泛的应用。 |
|
|
|
 |
|
|
|
步进电机的种类和特点 |
|
步进电机在构造上有三种主要类型:反应式(Variable Reluctance,VR)、永磁式(Permanent
Magnet,PM)和混合式(Hybrid Stepping,HS)。 |
- 反应式:
定子上有绕组、转子由软磁材料组成。结构简单、成本低、步距角小,可达1.2°、但动态性能差、效率低、发热大,可靠性难保证。
- 永磁式:
永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为7.5°或15°)。
- 混合式:
混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。其特点是输出力矩大、动态性能好,步矩角小,但结构复杂、成本相对较高。
|
|
按定子上绕组来分,共有二相、三相和五相等系列。最受欢迎的是两相混合式步进电机,约占 97%
以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好。该种电机的基本步矩角为1.8°/步,配上半步驱动器后,步矩角减少为0.9°,配上细分驱动器后其步矩角可细分达256倍(0.007°)。由于摩擦力和制造精度等原因,实际控制精度略低。同一步进电机可配不同细分的驱动器以改变精度和效果。 |
|
|
|
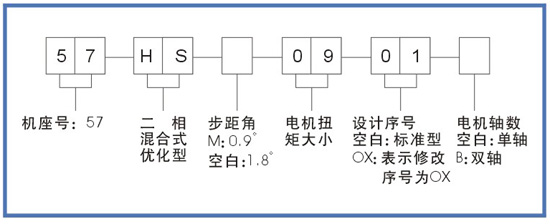
命名规则 |
|
 |
|
上例表示机座号为57mm,两相混合式,步距角为1.8度,扭矩0.9Nm,设计序号01,单边出轴的电机。 |
|
|
|
选型列表 |
|
外型
|
型号
|
静扭矩(Nm)
|
步距角(°)
|
引数
|
相电流(A)
|
电阻(Ω)
|
电感(mH)
|
长度L(mm)
|
转子惯量(g.cm2)
|
重量(Kg)
|
适配驱动器
|
|
串联
|
并联
|
|
35
|
35HS01
|
0.07
|
1.8
|
4
|
0.4
|
35
|
8.0
|
28
|
12
|
0.17
|
M415,M420
|
|
39
|
39HS02
|
0.22
|
1.8
|
4
|
0.6
|
15
|
16
|
34
|
20
|
0.18
|
M415,M420
|
|
42
|
42HS02
|
0.22
|
1.8
|
4
|
0.4
|
12.5
|
21
|
40
|
57
|
0.24
|
M415,M420
|
|
42HS03
|
0.34
|
1.8
|
8
|
0.7
|
1.4
|
4.6
|
4.0
|
48
|
82
|
0.34
|
M415,M420
|
|
57
|
57HS06
|
0.6
|
1.8
|
8
|
1.4
|
2.8
|
1.35
|
1.8
|
55
|
145
|
0.6
|
M420,M535
|
|
57HS09
|
0.9
|
1.8
|
8
|
2.0
|
3.5
|
0.8
|
1.2
|
54
|
260
|
0.6
|
M535,M860
|
|
57HSM09
|
0.8
|
0.9
|
8
|
1.4
|
2.8
|
1.8
|
2.5
|
54
|
260
|
0.6
|
M535,M860
|
|
57HS13
|
1.3
|
1.8
|
8
|
2.0
|
3.5
|
1.0
|
2.1
|
76
|
460
|
1.0
|
M535,M860
|
|
57HS22
|
2.2
|
1.8
|
8
|
2.0
|
4.0
|
0.67
|
1.8
|
76
|
480
|
1.1
|
M535,M860
|
|
86
|
86HS35
|
3.0
|
1.8
|
8
|
2.0
|
3.5
|
1.4
|
3.9
|
65
|
800
|
2.0
|
M535,M860
|
|
86HS45
|
4.5
|
1.8
|
8
|
3.0
|
5.9
|
0.8
|
3.5
|
79.5
|
1400
|
2.3
|
M535,M860
|
|
86HS85
|
8.5
|
1.8
|
8
|
3.5
|
7.0
|
0.95
|
5.2
|
118
|
2800
|
3.8
|
M860,MD2278
|
|
110
|
110HS12
|
12
|
1.8
|
4
|
5.0
|
0.95
|
15
|
99
|
5500
|
5.0
|
M860,MD2278
|
|
110HS20
|
20
|
1.8
|
4
|
6.5
|
1.15
|
18.9
|
150
|
11000
|
8.4
|
M860,MD2278
|
|
130
|
130HS27
|
27
|
1.8
|
4
|
6.0
|
0.65
|
13.8
|
227
|
35000
|
13
|
M860,MD2278
|
|
130HS45
|
45
|
1.8
|
4
|
7.0
|
0.9
|
9.5
|
283
|
48400
|
19
|
M860,MD2278
|
|
|
|
-
小体积,高力矩,品种齐全
-
可为批量用户定制非标电机
-
ISO9001:2000质量体系
-
大量出口欧洲、美国等地
|
|
|
|
怎样选择步进电机和驱动器 |
- 判断需多大力矩:
静扭矩是选择步进电机的主要参数之一。负载大时,需采用大力矩电机。力矩指标大时,电机外形也大。
- 判断电机运转速度:
转速要求高时,应选相电流较大的电机,以增加功率输入。且在选择驱动器时采用较高供电电压。
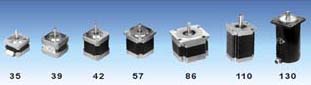
- 选择电机的安装规格:
如57,86,110等,主要与力矩要求有关。
- 确定定位精度和振动方面的要求情况:判断是否需细分,需多少细分。
- 根据电机的电流、细分和供电电压选择驱动器。
|
|
|
|
|
|
|
|
|